- Title: GUARDIAN: General Active Sensing for conDItion AssessmeNt
- Sponsor: DOE-NEUP
- Period: 7/1/2019-6/30/2022
- PI: Wilkins Aquino
- Co-PIs: Michael Zavlanos, Timothy Walsh (Sandia), Gregory Banyay (Westinghouse)
- IOMechLab Students: Mark Chen

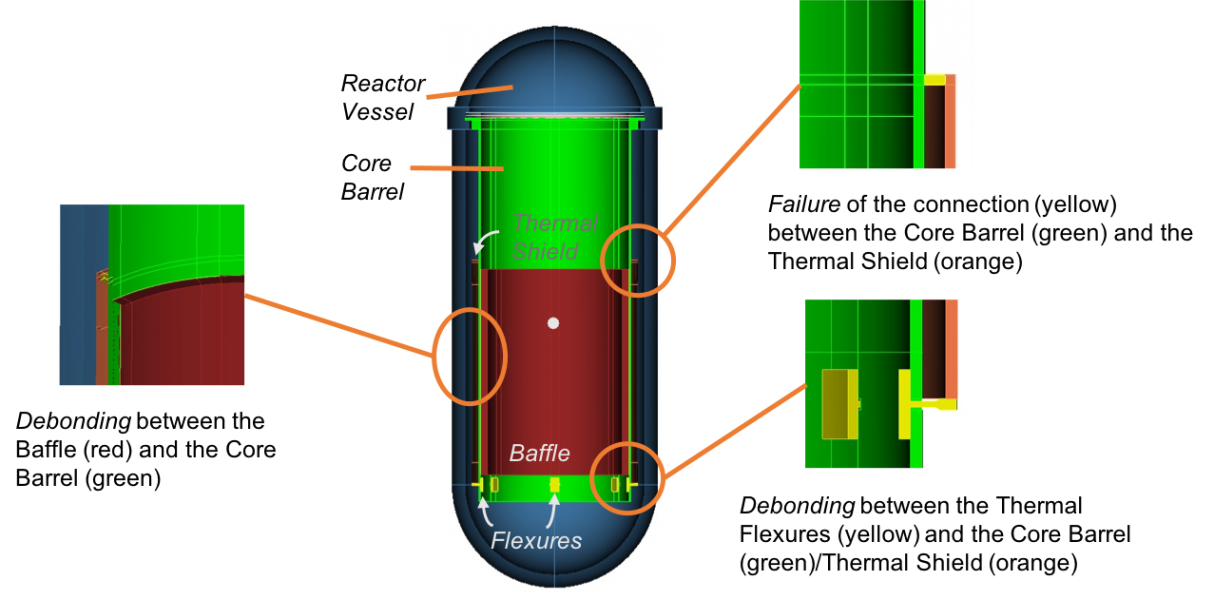
The goal of this project is to develop a dependable, autonomous or semi-autonomous, and minimally disruptive framework for monitoring equipment and components in nuclear reactors. One of the main challenges in monitoring these components is obtaining sufficient information through sensing such that reasoning systems can unambiguously detect and diagnose anomalies. Information is generally limited due to sparse and static sensor networks, and even when a large number of sensors is used, the information may be incomplete.
We are developing GUARDIAN, a robust active sensing framework through the integration of model-based inference and mobile actuating/sensing robots. Our approach is to address the monitoring problem from a holistic view in which inference from data and data acquisition (i.e. actuating and sensing) are highly integrated.